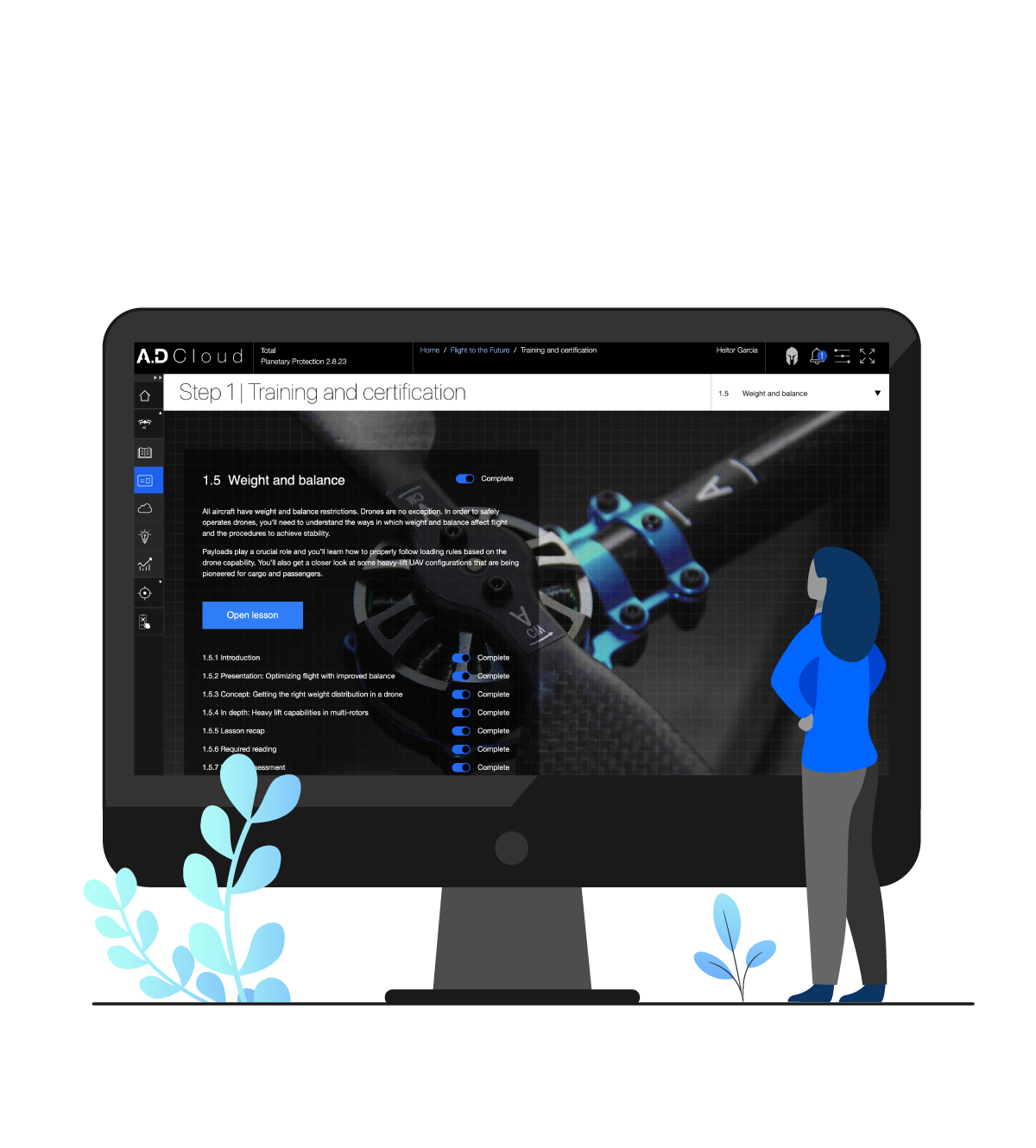
Step 1 | Lesson 1.5
Weight and balance
All aircraft have weight and balance restrictions. Drones are no exception. In order to safely operate drones, you’ll need to understand the ways in which weight and balance affect flight and the procedures to achieve stability.
Payloads play a crucial role and you’ll learn how to properly follow loading rules based on the drone capability. You’ll also get a closer look at some heavy-lift UAV configurations that are being pioneered for cargo and passengers.
Every Flight to the Future lesson has seven segments that take you through a Mind Expanding Journey.
– Introduction
– Presentation
– Concept
– In-depth
– Recap
– Required reading
– Assessment
1.5.1. Introduction
Center of gravity and rotational mass
The laws of physics govern flight, and the concept of center of gravity is no exception. Understanding what it is, how it is determined, what role a drone's pilot has in verifying compliance with manufacturer guidelines and what adjustments are possible, is a must for anyone who wishes to succeed in drone operations.
The key issue here is that the center of gravity is not a fixed-point on the craft and will, in fact, shift during movement.
Rotational mass is a concept in physics that describes the intensity of the force that is needed to counteract the inertia of any object undergoing a rotational movement. By the same token, it is also the force necessary to initiate the rotational movement of a stationary object.
This notion of rotational ‘inertia’ implies that the thrust generated by a drone’s motors must overcome the force generated by the total distribution of mass throughout the drone’s structure, in order to stop or initiate a rotational action.

1.5.2 Presentation
Optimizing flight with improved balance
The center of gravity is the exact point where the drone's weight is concentrated. If the drone was supported at its precise center of gravity, it would balance perfectly, at any attitude.
The position of the center of gravity has a great bearing upon flight stability, and the allowable location of the center of gravity is determined by manufacturers in accordance with the design of each particular drone. This is done by taking into consideration how the so-called center of thrust, the point where the force of lift occurs, will shift during flight.
Watch the teaser

1.5.3 Concept
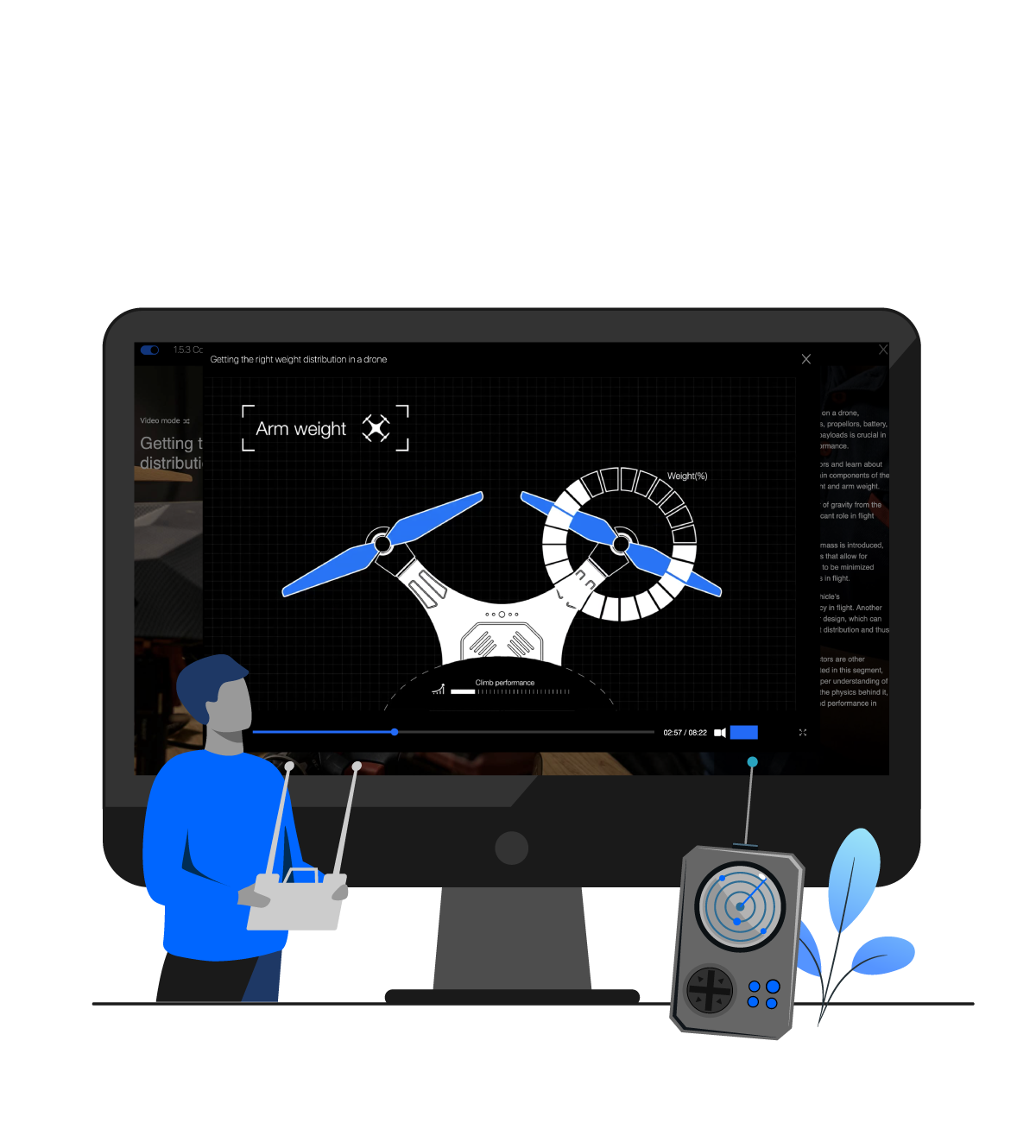
Getting the right weight distribution in a drone
The arm weight of a multi-rotor is composed of the motor, screws, propeller nuts, propellers, wiring and the weight of the frame arm itself. Here, the essential issue is to understand that as more weight is distributed to the end of the arms, the drone's performance will degrade.
Ideally the weight distribution on the arms must be as reduced as possible. This is why manufacturers put so much effort into making motors as light as can be, since it is the motor that represents the largest percentage of the total arm weight.
Watch the teaser
1.5.4 In-depth
Heavy lift capabilities in multi-rotors
What are they?
Heavy lift drones are typically able to carry a payload of over ten pounds, with top-of-the-line models capable of transporting in excess of 400 pounds.
They have the ability to carry various types of cargo and generally employ gas powered or hybrid engines. This makes them ideally suited for emergency response and life-critical delivery services.
The future of logistics
Heavy lift drones will play an important role in multi-mode logistics networks that utilize various forms of transportation to move cargo and products around the country.
Such capabilities promise faster, cheaper and safer logistics and utilize both manned and unmanned vehicles. We are starting to see multi-mode transport in emergency and life-critical applications.

1.5.5 Recap
Lesson summary
The drone’s vertical axis
The optimal position for the center of gravity on a drone's vertical, or Z, axis, is for it to be as close as possible in relation to the plane of the propeller discs or motors.
By using vectors to analyze the forces involved, we can deduce that this results in an equilibrium that is more stable – and a drone that is more responsive in flight.
Center of gravity on the X axis
On the X axis, the ideal position for the center of gravity is to be slightly to the front of the geometric center of the drone.
This produces a slight pitch forward and as we saw earlier, assists the forward motion of the drone, while preventing the rear end from dipping in hard turning maneuvers.

1.5.6 Required reading
Lesson library
Required
– Center of gravity
– What do I do after I crash my drone?
– Optimizing for FPV flight
– Drone motor calculator
– How to choose a drone frame
– Load factor and the flight envelope
For advanced readers
– Rotational inertia
1.5.7 Assessment
Lesson quiz
Regarding the center weight
– A less concentrated center of gravity will result in better performance.
– Placing the battery and camera on the bottom of the drone’s frame is the industry standard.
– Neither the battery nor the payload may be placed at the exact center of gravity.
– It is ideal to have the battery, camera and payload as close together as possible.
Ten multiple choice questions. An 80% score is needed to advance to the next lesson.